Wheel Slipping and Stalling of trains-an age old problem of IR
Wheel Slipping and Stalling
Wheel slipping and stalling of freight trains is one of the major hurdles in running of trains during a certain period of monsoon and dew during early hours of winter. Such happening is accepted as seasonal with stereotype repetition of age-old instruction and action plan circulated every year in the month of June-July. With the introduction of step less torque and creep control, the instructions do not carry much meaning. Now lets us have a look at how the train management unfolds in the next decade.
What is wheel slipping and stalling?
While negotiating an upgradient, there is every possibility wherein the applied tractive effort may exceed the adhesive weight. In such a situation, the wheel rotates at a higher speed as compared to linear motion. The traction control arrangement is such that the applied tractive effort is reduced to stop wheel slip which has a detrimental effect on the rail. With reduced tractive effort, there are chances that the train may come to a stop on a gradient, if so, it becomes difficult to start the train because the tractive effort requirement is now more than that when it was in motion. This leads to stalling of train requiring assisting engine to clear the block section.
Wheel Slip Control System
Wheel slips or skids when the tractive and braking effort applied or the wheel exceeds the adhesive weight. Both wheel slipping and skidding results damages to rail or wheel as the case may be. The conventional locomotive type WAG7 and WAP4 measures the difference in traction motor current, and if exceeds more than a prescribed limit, autoregression of tap changer takes place. This reduces the tractive effort and preventing the wheel slip. The reduction of tractive effort is normally much higher than the loss of adhesion, developing a probability of train coming to a stop on the gradient.
With the introduction of thyristor, GTO and IGBT base power converter, it could be possible to introduce micro control of tractive effort and creep. This has helped in optimizing the application of tractive effort as per available adhesion and chances of the train coming to a stop on the gradient reduced considerably.
Coefficient of Adhesion
Adhesion is the property between two bodies and there is a limit to the maximum value it can be harnessed. Adhesion is different from friction. When a tractive effort is applied, and the motion starts, the linear speed is slightly lower than the rotational speed and called creep speed. The creep increases with the increase in the tractive effort up to a limit, thereafter, creep speed increases without any increase in its ability to transmit additional tractive effort. The curve below explains the characteristics of the rail-wheel adhesion when subjected to tractive effort. (Read more at https://globalrailelectrica.com/wp-admin/post.php?post=227&action=edit
- The maximum coefficient of adhesion during dry and clean rail at any time is the value at the top of this curve. This top keeps on reducing with reduced coefficient of adhesion during inclement weather or impurities on rail table.
- Measurement of creep and micro-control of tractive effort helps in working at the top of this curve. This helps in the optimization of the available adhesion to effective use. This is possible with three-phase motor and separately excited DC motor working as a traction motor.
- Use of sanding will only help in improving adhesion when it drops considerably during inclement weather.
Individual control of traction motor helps to reduce tractive effort of only one motor. - Wheel slip control in a different class of locomotive is as follows:
- WAG7/WAP4: Individual control of Series DC traction motor with tractive effort reduced in steps and no creep control. However, provision of control of tractive effort of individual motor helps in isolation when defective and working the train up to destination with 5 motors up to the destination.
- WAG9/WAP5: Control of three-phase motor in one block and having creep control. Reference speed is determined through an algorithm. Tractive effort of three motors is reduced simultaneously when the tendency of wheel slip is detected. But with the introduction of IGBT device based converter, each axle is having its own converter and loss of tractive effort is less as compared to GTO based locomotive.
- 12000 HP: Twin locos with 8 numbers of three phases induction motor having creep control of two motors in one block. With 8 axles providing higher adhesive weight and creep control, the tendency of wheel slip will reduce.
- 9000 HP: 6 nos. of three-phase traction motor having a separate Main converter for each motor along with creep control will reduce the chances of wheel slip. The reference speed is taken from the rearmost axle having the least probability of slip due to higher adhesive weight arising due to weight transfer.
- Sanding improves adhesion during inclement weather. The capacity of the sandbox is limited and manual sanding shall not be resorted to by the loco pilot. The sanding shall come into service automatically when the sharp acceleration of wheel is detected, which is a sign of loss of adhesion. This will reduce the need for frequent sand filling.
- Quality of sand is an important issue for improving adhesion when actually required. Need for sanding will reduce considerably when automatic sanding is an integral part of the design and manual sanding is not permitted as a routine. Indian Railway shall consider for improving the quality of sand used for the purpose
- washed to remove fine dust,
- higher content of silica
- dried and stored
- sandbox water sealed
- and air intake fully dried.
- WAG9 (IGBT), 9000 and 12000 HP locomotive offer an excellent opportunity to overcome and minimize the incidence of wheel slipping and stalling. The new class also calls for the revised driving habit of not using manual sanding.
Attacking Speed on Gradient
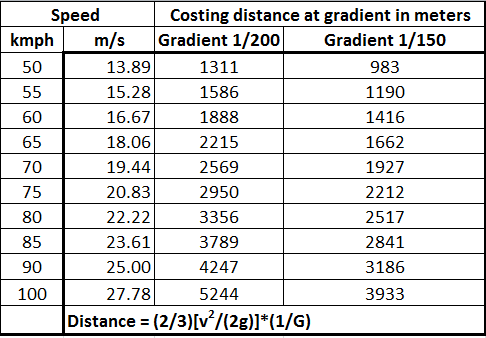
Attacking speed of the train at the start of the gradient plays an important role in its ability to negotiate the gradient comfortably. As per the simple equation of motion, we know v2+u2=2gh; and without traction and rolling only, the train will climb to a distance of v2/(2g) or will travel a linear distance of [v2/(2g)]*(1/G) where G is gradient i.e. vertical distance traveled divided by horizontal distance. It is observed as per the theoretical calculations considering the train resistance and factors a, b and c involved, 1/3rd of the energy is lost in overcoming train resistances. Therefore, empirically, the climbing distance for different speed and gradient can be calculated as per the formula: Distance = (1/3)[v2/(2g)]*(1/G) and costing distance table given below to understand the potential of attaching speed.
The attacking speed is generally of the order of 50-55 Kmph. This is mainly due to the restrictions imposed on the loaded stock when the carrying capacity of the wagon increased.
Indian Railway has decided to upgrade track to cater for 25 T axle load on dedicated freight corridor and feeder route. In case IR decides to upgrade the 3-4 Km stretch at the beginning of the upgradient permitting the speed to 75-80 Kmph ( and even 90-100 Kmph), negotiating the train on up gradient even when adhesion is limited to 20% for an exit speed of 30 kmph on a gradient of 5 km will be very easy. The expenditure involves will only be around 5 Crs per such section.
This is a much better option as compared to debate and debate of overpowering going on at the different forum but with no meaningful result. Overpowering is certainly a much costlier proposal as compared to upgrading the track to 25 T axle load before the start of such critical sections.
Raising attacking speed at the start of the vulnerable section will help IR coming out of the age old problem of wheel slipping and stalling meaningfully.

You may also like:
- Has Solar Power taken off to drive transport sector in…
- ‘Rescue’ Indian Railway passenger business through statistical indices ‘RSKU’
- Mechanized measurement and inspection – a help to cut down…
- Indian Railway Context – Sanding to improve adhesion
- Where to begin to understand Electrical Engineering?
- How Resistance is important in understanding Electricity?
Well said! It is a pity that few people understand the mechanics of traction.